Foto Inovație la Cluj. Roboți care pot apuca obiecte fragile, proiectați la UTCN de studenți din 6 țări
- Scris de Ziua de Cluj
- 18 Iun 2026, 13:23
- Educaţie
- Ascultă știrea






Studenți din șase țări europene au dezvoltat la Universitatea Tehnică din Cluj-Napoca, în cadrul unui program găzduit de Laboratorul Intelligent Mechatronic Systems, prototipuri de roboți capabili să manipuleze obiecte fragile.
Universitatea Tehnică din Cluj-Napoca, prin Laboratorul Intelligent Mechatronic Systems (IMSLab) din cadrul Facultății de Autovehicule Rutiere, Mecatronică și Mecanică, a găzduit programul Erasmus+ Blended Intensive Programme (BIP) „Mechatronics in Action: Design of Compliant Grippers for Soft Robotics”.
Participanți din Letonia, Finlanda, Italia, Spania, Germania și România au colaborat, timp de mai multe săptămâni, în echipe internaționale, parcurgând toate etapele dezvoltării unui sistem mecatronic: de la proiectare și simulare, până la fabricație și testare.
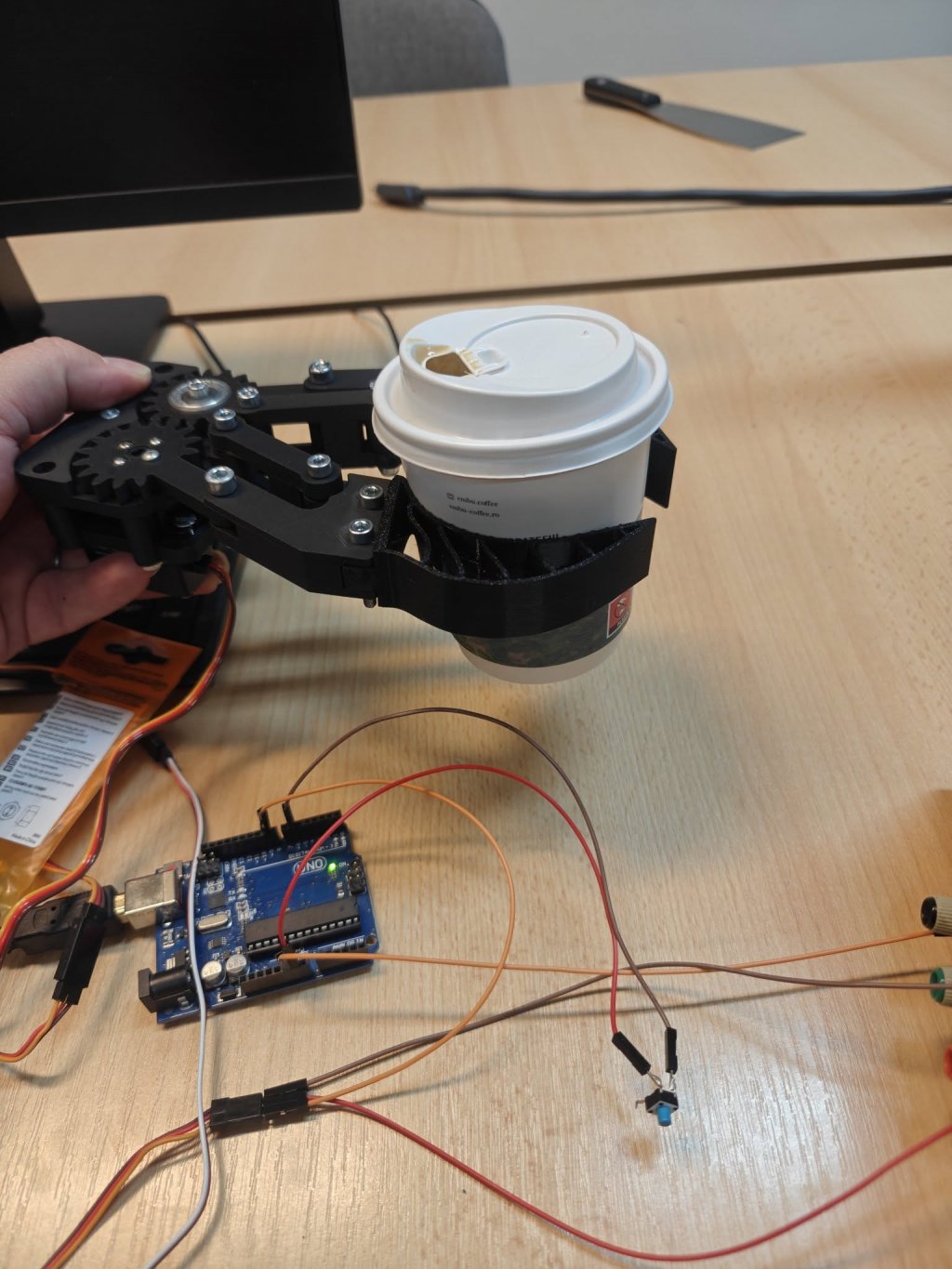
„Provocarea finală? Dezvoltarea unor dispozitive robotice de prindere, inspirate din natură și bazate pe efectul Fin-Ray, capabile să manipuleze cu grijă fructe precum mere, portocale și roșii. Rezultatul: trei prototipuri funcționale, realizate prin muncă în echipă, creativitate și aplicarea cunoștințelor inginerești în contexte reale” - transmit reprezentanții UTCN.
Programul a fost conceput și coordonat de echipa IMSLab, formată din Conf. dr. ing. Ciprian Lăpușan și S.l. dr. ing. Ciprian Rad, din cadrul Departamentului de Mecatronică și Dinamica Mașinilor, împreună cu S.l. dr. ing. Radu Ștefan Chiorean, din cadrul Departamentului de Inginerie Mecanică.










